
गॅन्ट्री रोबोटमध्ये स्तंभ फ्रेम, X-अक्ष घटक, Y-अक्ष घटक, Z-अक्ष घटक, स्थिरता आणि नियंत्रण बॉक्स असतात.
हे आयताकृती X, Y, Z त्रि-आयामी समन्वय प्रणालीवर आधारित पूर्णपणे स्वयंचलित औद्योगिक उपकरणे आहे, जे वर्कपीसची स्थिती समायोजित करू शकते किंवा वर्कपीसच्या प्रक्षेपण हालचालीची जाणीव करू शकते. त्याचे नियंत्रण कोर औद्योगिक नियंत्रकांद्वारे लागू केले जाते.
कंट्रोलर विविध इनपुट सिग्नल्सचे विश्लेषण करतो आणि त्यावर प्रक्रिया करतो, तार्किक निर्णय घेतो, त्यानंतर X, Y आणि Z अक्षांमधील संयुक्त गती पूर्ण करण्यासाठी प्रत्येक आउटपुट घटकाला अंमलबजावणी आदेश जारी करतो आणि पूर्णपणे स्वयंचलित ऑपरेशन प्रक्रियेचा संपूर्ण संच साकारतो.
हे उत्पादन असेंब्ली आणि वाहतूक, कन्व्हेयर सिस्टम आणि मानवरहित कार्य साइट्समध्ये वापरले जाते. हे तात्पुरते स्टोरेज आणि लॉजिस्टिकसाठी महत्त्वाचे परिधीय उपकरण म्हणून वापरले जाऊ शकते आणि सुलभ वापरासाठी होस्ट उपकरणांशी लवचिकपणे जुळले जाऊ शकते. ऍप्लिकेशन इंडस्ट्रीज यामध्ये सामील आहेत: अंतिम असेंब्ली, उप-विधानसभा, प्रक्रिया, चाचणी, डीबगिंग आणि उत्पादनांची वाहतूक आणि त्यामुळे मुलगा.
विविध प्रकारच्या सामग्री हाताळणीमध्ये कमी कार्यक्षमता किंवा उच्च हाताळणीच्या जोखमीच्या समस्यांचे निराकरण करण्यात ग्राहकांना मदत करणे ही उत्पादन वैशिष्ट्ये आहेत, जेणेकरून हाताळणीची जोखीम सोयीस्करपणे आणि त्वरीत कमी करणे, वेळ, श्रम वाचवणे, श्रम वाचवणे आणि कामगार बदलणे.
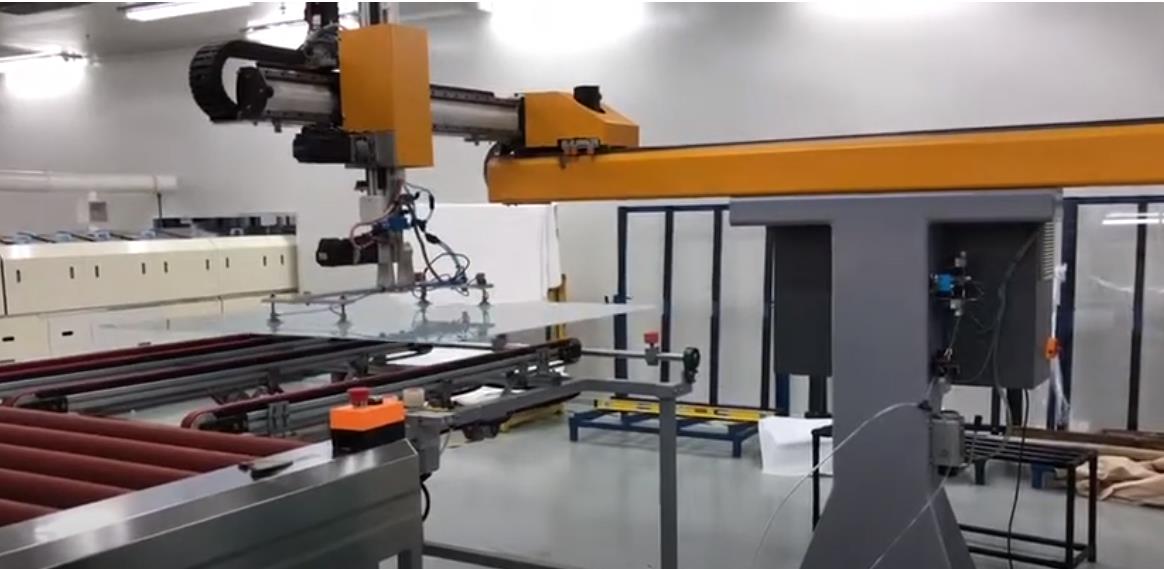
 काचेसाठी या गॅन्ट्री ट्रस मॅनिपुलेटर हाताळणी उपकरणामध्ये स्तंभांवर स्थापित केलेले स्तंभ आणि क्रॉस बीम समाविष्ट आहेत. क्रॉस बीम स्लाइड रेलसह स्थापित केले आहेत. स्लाइड रेल ट्रान्सव्हर्स स्लाइडिंग डिव्हाइससह स्थापित केले आहेत. ट्रान्सव्हर्स स्लाइडिंग डिव्हाइस उभ्या स्लाइडिंग डिव्हाइस आणि वायवीय सक्शन कप डिव्हाइससह स्थापित केले आहे. हे लक्षात येते की वाहतूक यंत्रणा त्रिमितीय जागेत एका निश्चित बिंदूवर फिरते, सक्शन कपमधून काच शोषून घेते, प्रथम X-अक्षावर बाजूने हलवा, नंतर नियुक्त केलेल्या स्थितीत 90 अंश फ्लिप करा आणि नंतर वर जा. आणि Y-अक्षावर खाली. सेट स्थितीत पोहोचल्यानंतर, काच सोडा आणि काचेच्या शेल्फवर ठेवा. संपूर्ण उपकरणाची संरचनात्मक स्थिरता खूप जास्त आहे, ज्यामुळे हाताळणी मोठ्या प्रमाणात सुधारते. कार्यक्षमता
काचेसाठी या गॅन्ट्री ट्रस मॅनिपुलेटर हाताळणी उपकरणामध्ये स्तंभांवर स्थापित केलेले स्तंभ आणि क्रॉस बीम समाविष्ट आहेत. क्रॉस बीम स्लाइड रेलसह स्थापित केले आहेत. स्लाइड रेल ट्रान्सव्हर्स स्लाइडिंग डिव्हाइससह स्थापित केले आहेत. ट्रान्सव्हर्स स्लाइडिंग डिव्हाइस उभ्या स्लाइडिंग डिव्हाइस आणि वायवीय सक्शन कप डिव्हाइससह स्थापित केले आहे. हे लक्षात येते की वाहतूक यंत्रणा त्रिमितीय जागेत एका निश्चित बिंदूवर फिरते, सक्शन कपमधून काच शोषून घेते, प्रथम X-अक्षावर बाजूने हलवा, नंतर नियुक्त केलेल्या स्थितीत 90 अंश फ्लिप करा आणि नंतर वर जा. आणि Y-अक्षावर खाली. सेट स्थितीत पोहोचल्यानंतर, काच सोडा आणि काचेच्या शेल्फवर ठेवा. संपूर्ण उपकरणाची संरचनात्मक स्थिरता खूप जास्त आहे, ज्यामुळे हाताळणी मोठ्या प्रमाणात सुधारते. कार्यक्षमता

पोस्ट वेळ: मार्च-18-2024



